Содержание
Решения компании Philips Semiconductors для шин CAN и LIN
Заказать этот номер
2005№1
В наше время вряд ли найдется инженерu001dэлектронщик, не слышавший о шинах CAN и LIN. Эти интерфейсы уже завоевали прочные позиции во многих областях производства. И с большой долей уверенности можно сказать, что и в дальнейшем количество применений CAN и LIN будет только расти. Напомним кратко об этих шинах и их основных отличиях.
CAN
Основные характеристики шины CAN: высокая скорость передачи данных, сверхвысокая надежность системы и ее отказоустойчивость в экстремальных условиях. Хорошим примером использования шины CAN может служить современный автомобиль. CAN используется в таких ответственных системах автомобиля, как управление двигателем, обеспечение безопасности (подушки безопасности, АБС, контроль давления шин) и т. д. Шина CAN заняла прочные позиции не только в автомобилестроении, но и в авиации, военной технике, на железной дороге, в системах управления технологическим оборудованием.
LIN
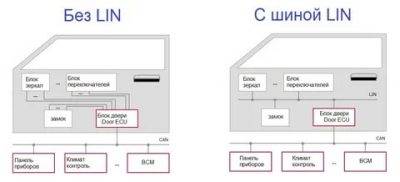
Стандарт LIN был разработан как дешевое дополнение CAN-интерфейса в тех областях, где не требуется высокая скорость передачи данных и высокая надежность. Стандарт LIN был разработан для создания дешевых локальных сетей обмена данными на небольших расстояниях. В автомобиле, например, такие устройства, как стеклоочистители, электростеклоподъемники, замки дверей, приводы и обогрев зеркал, а также приводы сидений объединены в единую сеть LIN.
Компания Philips Semiconductors является лидером в разработке микросхем для шин CAN и LIN.
К 2003 году компания Philips Semiconductors в общей сложности выпустила 500 млн штук CAN-трансиверов.
Рассмотрим номенклатуру трансиверов CAN и LIN на примере автомобиля. В автомобиле применяются различные электронные управляющие узлы ECU (Electronic Control Units). В зависимости от потребляемого тока эти узлы можно условно разбить на 4 вида устройств (см. рис. 1), требующих различных схемотехнических решений.
Рис. 1. Основные типы узлов шины
Приложения, которые должны работать всегда, даже когда автомобиль припаркован и зажигание выключено. Устройства постоянно потребляют ток из батареи питания. Такие узлы по сложившейся на Западе традиции называют «Clamp-30». Подобные узлы должны потреблять как можно меньше энергии для сохранения заряда батареи автомобиля.
Узлы типа B
Приложения, в которых микроконтроллер всегда активен. В этих приложениях требуется уменьшить потребление энергии, и поэтому необходимо переводить трансивер в режим экономии электроэнергии. Приложения типа В относятся к узлам «Clamp-30».
Узлы типа C
В отличие от приложений типа В, в приложениях типа С требуется еще большая экономия электроэнергии, поэтому трансивер должен полностью отключаться сигналом с микроконтроллера. Такие приложения требуют абсолютно пассивного поведения отключенного трансивера по отношению к шине.
Узлы типа D
Приложения, которые полностью отключаются от питания при выключении зажигания. К таким приложениям не предъявляется требование минимального потребления тока, так как при их функционировании идет заряд батареи от работающего двигателя. Приложения типа D принято называть узлами типа «Clamp-15».
В каждом из типов узлов требуется применение различных микросхем. Рассмотрим конкретные микросхемы.
Новые высокоскоростные CAN-трансиверы TJA1040, TJA1041 и TJA1050 компании Philips основаны на передовой технологии «кремний-на-изоляторе» — SOI (Silicon-on-Insulator). Благодаря этой технологии новые трансиверы в сравнении с трансиверами предыдущего поколения PCA82C250 и PCA82C251 имеют уменьшенный уровень электромагнитного излучения (20 дБ) и высокую устойчивость к электромагнитному излучению.
Трансивер TJA1040 имеет режим Standby с удаленным запуском по шине и потреблением тока в этом режиме менее 15 мкА. TJA1040 рекомендуется для приложений, постоянно подключенных к линии питания «Clamp-30» и содержащих микроконтроллер (см. рис. 2). Кроме того, TJA1040 имеет абсолютно пассивное поведение при отключении питания, и поэтому невидим для шины. Эта особенность трансивера TJA1040 делает его пригодным также для применений в узлах типа «Clamp-15», когда при выключенном зажигании другие узлы общаются по CAN-шине.
Рис. 2. Рекомендуемые варианты использования микросхем семейства TJA1040/41/50 в узлах шины А, В, С и D
Трансивер TJA1041 имеет несколько особенностей в сравнении с TJA1040:
- спящий режим с потреблением тока всего узла 20 мкА;
- удаленный запуск по шине и локальный запуск через специальный вывод, что позволяет определить источник запуска;
- уникальные возможности диагностики и сигнализации отказа шины:
- сигнализация коротких замыканий, включая «скрытые»;
- сигнализация о локальных сбоях.
Благодаря этим свойствам TJA1041 имеет очень гибкую систему управления потреблением тока и рекомендуется для применения в узлах типа А (см. рис. 2).
Трансивер TJA1050 имеет схожие с TJA1040 характеристики, но при отключенном питании во время общения других устройств отдает вшину обратный ток. (TJA1040 имеет нулевой обратный ток.) Обратный ток немного увеличивает электромагнитное излучение шины. Поэтому если требования к электромагнитной совместимости не очень высокие, а требования к цене устройства очень жесткие, то рекомендуется в узлах типа D применять TJA1050. (TJA1050 дешевле TJA1040 на 20–30%).
Рекомендуемые варианты использования микросхем семейства TJA1040/41/50 в узлах шины А, В, С и D представлены на рис. 2.
Кроме высокоскоростных трансиверов TJA1040/41/50 компания Philips выпускает помехозащищенные приемопередатчики FT-CAN (FT — Fault-tolerant, то есть помехозащищенный) TJA1054 и TJA1054A. Они идентичны высокоскоростным трансиверам TJA1040, 41 и 50, но обладают повышенной помехозащищенностью. Ниже представлены основные отличия FT-CAN-приемопередатчиков TJA1054 и TJA1054A.
TJA1054
- TJA1054 является «образцовым» устройством, так как по нему фактически был написан стандарт ISO11898-3 (FT-CAN).
- Спящий режим с потреблением тока для всего узла 30 мкА.
- Великолепные параметры ЭМС благодаря технологии SOI.
- Уникальные дополнительные функции отказобезопасности (аналогичные TJA1041).
- Абсолютно пассивное поведение при отключении питания.
- Нулевой обратный ток.
TJA1054A
- Версия TJA1054 с улучшенной защитой от электростатического разряда: – защита до 4 кВ в модели человеческого тела по выводам CANH, CANL, RTH, RTL (по сравнению с 2 кВ в TJA1054); – защита до ±300 В в машинной модели (по сравнению с ±175 В в TJA1054).
- Остальные технические параметры идентичны TJA1054.
- Полностью соответствует ISO11898-3.
- Рекомендуется как FT-CAN-трансивер в новых разработках.
Компания Philips также выпускает специальный трансивер, работающий с однопроводной шиной CAN. Трансивер был специально разработан для узкого сегмента рынка с требованиями минимальной стоимости реализации шины.
Это 1W-CAN-приемопередатчик AU5790 (1W — однопроводной).
Основные параметры приемопередатчика AU5790:
- Скорость передачи данных 40 кбит/с.
- Скорость получения данных 100 кбит/с.
- Инновационные функции экономии энергии.
- Уникальные функции запуска позволяют осуществлять коммуникацию двух устройств без запуска всех шин.
- Обеспечивает работу шины в припаркованном автомобиле.
- Спящий режим с потреблением 70 мкА.
- Функция защиты от потери «земли».
- Поддержка до 32 узлов.
Мы рассмотрели всю номенклатуру CAN трансиверов Philips. Как видим, инженеру есть из чего выбрать. В устройстве можно применить дорогие трансиверы с идеальными характеристиками или разработать устройство на дешевых микросхемах для приложений, не предъявляющих жестких технических требований.
Теперь рассмотрим, какие же решения предлагает Philips для LIN-приложений.
Приемопередатчик TJA1020
Основные параметры приемопередатчика TJA1020:
- Лучшее в классе потребление энергии — потребление всего узла в спящем режиме всего 3 мкА.
- Лучшие в классе параметры ЭМС благодаря технологии SOI.
- Уникальные возможности по отказобезопасности.
- Питание стабилизатора напряжения от вывода INH! (позволяет использовать более дешевый стабилизатор напряжения).
- Распознавание источника запуска — различие локального и удаленного запуска позволяет решать локальные задачи локально, без запуска всей сети.
- Пассивное поведение при отключении питания — нулевой обратный ток.
- Уровни входов совместимы с контроллерами 3,3 и 5 В.
Как упомянуто выше, LIN-приемопередатчик TJA1020 имеет лучшие в классе параметры по электромагнитной совместимости.
Рис. 3. Схема типичного включения TJA1020
На рис. 3 показана схема типичного включения TJA1020. Микроконтроллер P87LPC764 и трансивер TJA1020 образуют Slave-устройство. Микроконтроллер управляет приемопередачей по шине LIN и может переводить TJA1020 в спящий режим. UART может быть запрограммирован на частоты 2400, 9600 и 19200 бит/с или на другие частоты в зависимости от частоты кристалла. Как видно из примера, TJA1020 занимает у микроконтроллера минимальные ресурсы: выводы UART и один вывод прерывания. Это Slave-устройство может использоваться для считывания команд с кнопок управления различными двигателями автомобиля, например двигателями стеклоподъемника.
В данный момент компания Philips ведет разработки микросхем CAN/LIN нового поколения. Это будут «системы-на-чипе» под названием UJA106x. В состав микросхемы будет входить CAN- и LIN-приемопередатчик, два стабилизатора напряжения, 16-битный интерфейс управления SPI, разнообразные функции защиты от опасных состояний. Блок-схема нового чипа показана на рис. 4.
Рис. 4. Блок схема нового чипа UJA106x
Так, например, для создания системы управления двигателем автомобиля к новому чипу необходимо будет добавить всего лишь один микроконтроллер и получится готовое устройство, имеющее очень привлекательную цену.
Компания Philips также недавно анонсировала новое решение для более дешевого построения шины LIN в автомобиле — микросхему UJA1023. Построение сети на основе UJA1023 позволяет снизить стоимость решения на 10%. UJA1023 представляет собой расширитель LIN-шины. С его помощью подключать до 8 LIN-узлов. Например, светодиодную подсветку, кнопки, датчики, силовые ключи для управления лампами и моторами. Выводы микросхемы могут быть сконфигурированы для управления верхними и нижними ключами или как канал PWM.
В состав UJA1023 входят:
- LIN-трансивер;
- 30-килоомный резистор (необходимый для устройств LIN-Slaves);
- регулятор напряжения;
- осциллятор;
- восемь двунаправленных входов-выходов;
- блок автоматической синхронизации скорости передачи данных от 1 до 20 кбит/с;
- 8-битный АЦП. Основные параметры UJA1023:
- низкое энергопотребление;
- конфигурируемый спящий режим;
- очень низкая эмиссия электромагнитного излучения;
- высокая устойчивость к электромагнитному излучению;
- линия шины защищена от опасных состояний;
- диапазон рабочих температур — от –40 до +125 °С.
Структурная схема UJA1023 представлена на рис. 5.
Рис. 5. Блок диаграмма LIN!расширителя UJA1023
Для российского рынка наиболее интересным примером применения микросхемы UJA1023 может служить модуль управления освещением автомобиля. При использовании микросхемы UJA1023 нет необходимости перекраивать стандартную проводку автомобиля. Все цепи управления можно легко разместить в стандартном разъеме лампы. Структурная схема такой реализации показана на рис. 6.
Рис. 6. Пример модуля управления светотехникой автомобиля
Скачать статью в формате PDF
Другие статьи по данной теме:
Сообщить об ошибке
Если Вы заметили какие-либо неточности в статье (отсутствующие рисунки, таблицы, недостоверную информацию и т.п.), просьба сообщить нам об этом. Пожалуйста укажите ссылку на страницу и описание проблемы.
Источник: https://www.kit-e.ru/articles/telecommunication/2005_1_78.php
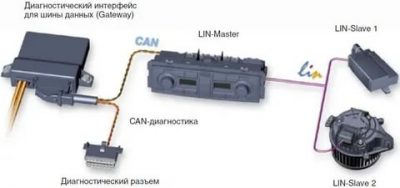
Диагностика шины CAN доступным языком — АвтоМастера.нет
Измерение и диагностика шины CAN
Часто основной причиной неисправности в электронной системе управления транспортным средством — являются механические повреждения шины CAN или выход из строя блоков управления, висящих на шине CAN.
Ниже в статье приведены способы диагностики шины CAN при различных неисправностях. В качестве примера показана типичная схема CAN шины на тракторе Valtra T ' серии.
Условные обозначения:
- ICL — Instrumental Cluster (Панель приборов)
- TC1/TC2 — Transmission controller (Блок управления трансмиссией 1/2)
- EC — Electronic controller (Блок управления двигателем)
- PCU — Pump Control Unit (Блок управления топливным насосом)
Измерения шины CAN BUS
— Оконечные резисторы 120 Ом (Иногда эти резисторы называют терминаторы) внутри блока управления EC и резистор, расположенный рядом с блоком TC1
— Если на дисплее (на боковой стойке) отображается код неисправности, имеющий отношение к шине CAN, то это означает неисправность проводки шины CAN или блока управления.
Система может автоматически сообщить, какой из блоков управления не может получать информацию (мониторы блоков управления передают информацию друг другу).
— Если дисплей мигает или сообщение шины CAN не может быть передано через шину, то для обнаружения места повреждения проводки шины CAN (или неисправного блока управления) можно использовать мультиметр.
Шина CAN не имеет физических повреждений
Войдите/Зарегистрируйтесь, чтобы увеличить
— Если сопротивление между проводами Hi (Высокое) и Lo (Низкое) шины CAN (в любой точке) примерно равно 60 Ом, то шина CAN не имеет физических повреждений.
— Блоки управления EC и TC1 исправны, так как оконечные резисторы (120 Ом) расположены в блоке EC и рядом с блоком TC1.
— Блок управления TC2 и приборная панель ICL также не повреждены, поскольку шина CAN проходит через эти блоки.
Шина CAN повреждена
Войдите/Зарегистрируйтесь, чтобы увеличить
— Если сопротивление между проводами Hi и Lo шины CAN (в любой точке) примерно равно 120 Ом, то проводка шины CAN повреждена (один или оба провода).
Шина CAN имеет физические повреждения
Войдите/Зарегистрируйтесь, чтобы увеличить
Если шина CAN повреждена, следует определить место повреждения.
— Сначала замеряется сопротивление провода CAN-Lo, например, между блоками управления EC и TC2.
-Таким образом, измерения должны быть выполнены между разъемами Lo-Lo или Hi-Hi. Если сопротивление примерно равно 0 Ом, то провод между измеряемыми точками не поврежден.
— Если сопротивление примерно равно 240 Ом, то между измеряемыми точками шина повреждена. На рисунке показано повреждение провода CAN-Lo между блоком управления TC1 и приборной панелью ICL.
Короткое замыкание в шине CAN
Войдите/Зарегистрируйтесь, чтобы увеличить
— Если сопротивление между проводами CAN-Hi и CAN-Lo примерно равно 0 Ом, то в шине CAN произошло короткое замыкание.
— Отсоедините один из блоков управления и измерьте сопротивление между контактами разъемов CAN-Hi и CAN-Lo на блоке управления. Если устройство исправно, установите его на место.
— Затем отсоедините следующее устройство, выполните измерения. Действуйте таким образом до тех пор, пока не будет обнаружено неисправное устройство. Блок неисправен, если сопротивление примерно равно 0 Ом.
— Если все блоки проверены, а измерения по-прежнему сигнализируют о коротком замыкании, это означает неисправность проводки шины CAN. Чтобы найти место повреждения проводов, их следует проверить визуально.
Измерение напряжения шины CAN
Войдите/Зарегистрируйтесь, чтобы увеличить
— Включите питание и измерьте напряжение между проводами CAN-Hi, CAN-Lo и проводом заземления.
— Напряжение должно находиться в диапазоне 2,4 — 2,7 В.
Тип:СкладчинаНачало:29-4-2020 18:05Место:avtomastera.net Оплата:5000 руб. Участвуют:7 чел. Окончание:29-5-2020 18:05
Последние посетители
|
|
| Ответ Спасибо!133Цитата РеквизитЖалоба |
!page!
Источник: https://avtomastera.net/thread-5686-1-1.html
LIN шина
LIN протокол разработан для создания дешевых локальных сетей обмена данными на коротких расстояниях. Он служит для передачи входных воздействий, состояний переключателей на панелях управления, а также ответных действий различных устройств, соединенных в одну систему через LIN.
Первая спецификация стандарта под брендом LIN была издана в 1999 году по инициативе консорциума европейских автопроизводителей и других известных компаний, включая Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc., Volcano Communications Technologies AB, Volkswagen AG и VolvoCar Corporation. Последняя спецификация, LIN 2.2, издана в 2010 году. В настоящее время документы стандарта переданы под контроль Международной организации по стандартизации (ISO), где стандарту был присвоено новое наименование ISO 17987. В связи с политикой ISO копия стандарта стала платной.
Шина LIN
LIN шина (локальная сеть воздействия) была разработана для удовлетворения потребностей в связи для систем класса А (см. табл. «Классификация шинных систем» ) с использованием самого экономичного оборудования. Типичные области применения:
- Дверной модуль с дверным замком;
- Приводы стеклоподъемников;
- Регулировка боковых зеркал заднего вида;
- Система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
Текущую спецификацию LIN можно найти на сайте консорциума LIN.
Важные особенности шины LIN:
- Концепции с одним ведущим и несколькими ведомыми устройствами;
- Небольшая стоимость оборудования за счет передачи данных по неэкранированному однопроводному кабелю;
- Самосинхронизация ведомых устройств без кварцевого генератора;
- Связь в виде очень коротких сообщений;
- Скорость передачи данных до 20 кбит/с;
- Длина шины до 40 м, до 16 узлов.
Система передачи в шине LIN
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Из-за наличия разных вариантов электрических цепей уровни могут быть разными. Определение допусков на передачу и прием в области рецессивных и доминантных уровней обеспечивает стабильную передачу данных. Диапазоны допусков шире на приемном конце (рис. «Уровень напряжения на линии данных шины LIN» ), чтобы действительные сигналы тоже можно было получать, несмотря па излучаемые помехи.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN. Рекомендуется не более 16 узлов.
Пользователи шины обычно располагаются в линейной топологии; однако эта топология не является обязательной.
Доступ к шине LIN
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Во время обмена сообщениями между ведущим и ведомым устройством возможны следующие взаимосвязи:
- Сообщение с ответом ведомого: ведущее устройство передает сообщение одному или нескольким ведомым устройствам и запрашивает данные (например, состояния измеренных значений);
- Сообщение с инструкцией ведущего: ведущее устройство передает инструкции ведомому устройству (например, включение сервопривода);
- Сообщение для использования: ведущее устройство инициирует связь между двумя ведомыми устройствами.
Фрейм данных LIN
Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Заголовок
Заголовок состоит из разрыва синхронизации, поля синхронизации и поля идентификации.
Синхронизация LIN
Синхронизация происходит в начале каждого фрейма для обеспечения последовательной передачи данных между ведущим и ведомыми устройствами. Сначала разрывом синхронизации четко определяется начало фрейма. Он состоит из не менее 13 последовательных доминантных уровней и одного рецессивного уровня.
После разрыва синхронизации ведущее устройство передает поле синхронизации, состоящее из последовательности битов 01010101. Это дает ведомым устройствам возможность адаптироваться к временной оси ведущего. Тактовый импульс ведущего устройства не должен отличаться от номинального значения более чем на ±0,5%. Тактовый импульс ведомых устройств перед синхронизацией может иметь разброс ±15 %, если синхронизация к концу сообщения достигает уровня ±2 %. Таким образом, ведомым устройствам не нужен дорогой кварцевый генератор — они могут быть выполнены, например, с экономичной резистивно-емкостной цепью.
Идентификатор LIN
Третий байт в заголовке служит идентификатором LIN. По аналогии с шиной CAN здесь используется адресация по содержанию — идентификатор дает информацию о содержании сообщения. Все подключенные к шине узлы на основании этой информации решают, намерены ли они получить и обработать сообщение или же проигнорировать его (фильтрация при приемке).
Шесть или восемь битов в поле идентификатора определяют сам идентификатор; из них получается 64 возможных идентификатора (ID). Имеются следующие значения:
- ID = 0 — 59: передача сигналов;
- ID = 60: запрос команд и диагностики от ведущего устройства;
- ID = 61: отклик ведомого устройства на ID 60;
- ID = 62: зарезервирован для связи с изготовителем;
- ID = 63: зарезервирован для будущих расширений протокола.
Из 64 возможных сообщений 32 могут содержать только два байта данных, 16 — четыре байта данных, и остальные 16 — восемь байтов данных.
Последние два разряда в поле идентификации содержат контрольные суммы, защищающие идентификатор от ошибок при передаче и неправильного распределения сообщений.
Поле данных
После передачи ведущим устройством заголовка начинается передача фактических данных. Ведомые устройства по переданному идентификатору определяют, являются ли они адресатами и, при необходимости, отправляют ответ в поле данных.
В один фрейм можно включить несколько сигналов. Здесь у каждого сигнала есть один генератор, т.е. он всегда описывается одним и тем же узлом сети. Во время работы не разрешается сопоставлять сигналу другой генератор, что возможно в других сетях с управлением по времени.
Данные в ответе ведомого устройства защищаются контрольной суммой (CS).
Описательный файл LIN
Конфигурация шины LIN, т.е. спецификация пользователей сети, сигналов и фреймов, выполняется в описательном файле LIN. Спецификация LIN для этой цели имеет подходящий язык конфигурации.
Из описательного файла LIN автоматически генерируется набор кодов на С и файлов заголовков; эти коды и файлы используются для реализации функций ведущего и ведомых устройств в ЭБУ, расположенных на шине. Таким образом, описательный файл LIN служит для конфигурации всей сети LIN. Это общий интерфейс между автопроизводителем и поставщиками ведущих и ведомых устройств.
Источник: http://press.ocenin.ru/lin-shina/